
This week I was supposed to continue on the UV-mapping of the different robots. I had a meeting with our graphic teacher, Jonatan this tuesday and he gave me some advice on how to make the UVs in such a way that I could use them for both the fusion and the base version of the robots.
Instead of making an extra UV-map with the added details in the fusions, I UV-map the fused version of the robots. I also make sure to add any details that might only be visible on the unfused version in this UV. Then I can apply the UV for both the fusion and base version.
On wednesday I was asked to design new puzzles instead since we feelt that the UV-maping wasn’t as urgent as the puzzles. Our producer, Mathias, is also our level designer and makes the different levels in Unity. Now that it’s almost time to start on the next level, he needs some new challenges to use in the design of the level. Therefor, I spent the rest of the week designing different challanges for the player and figuring out how to use our differnt robot combinations in such interesting ways as possible.
 Design for the last room in the first level.
Design for the last room in the first level. 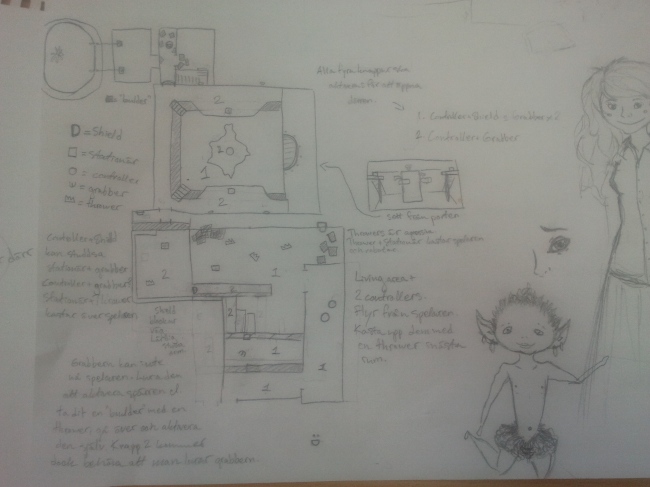
Sketch of a city area.

Sketch of extra challanges for the factory area.
I made some different sketches. It was a bit tricky to come up with new puzzles, since we only have five different robots and three different fusions, but we also want to have different solutions to every puzzle. If I were to add all the different robots in a room, the game would be too easy, but if I add too few, there won’t be different solutions, which is one of our goals with the game; to have a different solutions for every puzzle.
While designing these puzzles I came to the conclusion that we won’t be able to keep that goal in every challenge. In the beginning of the game the player need to learn about the different robots to make sure that the player has enough knowledge about the different robots before reaching the more difficult challanges. Therefore, I designed some puzzles with only one or two different solutions, to give the player a moment to learn about the different ways to use the robot combinations.
Mathias will start to build the new level next week, so I think we’ll discuss my different designs then!







